


脊髄損傷者のための歩行支援技術
1. はじめに
脊髄損傷とは、交通事故や転倒・転落などによる外傷、あるいは病気によって脊髄が損傷され、損傷部位より下の運動機能や感覚が失われる状態を指します。損傷の部位や程度により、下肢の麻痺や排泄機能障害など様々な障害が生じます。日本における外傷性脊髄損傷の年間の発生率は100万人あたり49人と推定されており1)、また、労働災害による脊髄損傷の多くは転落に起因し、建設・土木業で多く見られます2)。近年では高齢化の影響もあり、平地での転倒によるケースも増えています3)。脊髄損傷者の復職率は13~25%程度と報告されており4-5)、労働災害防止に加え、事故後の職場復帰を支援する取り組みが重要な課題となっています。
2. 外骨格の利点と課題
こうした背景のもと、近年では「パワード・エクソスケルトン」と呼ばれる動力付外骨格型機器(以下、外骨格)が臨床現場で利用されるようになっています。外骨格は、身体を支えるフレームにセンサやアクチュエータを搭載し、コンピュータ制御によって歩行や立ち座り動作を補助します。外骨格を用いた歩行リハビリテーションは、脊髄損傷者の歩行を支援するとともに、筋肉のこわばり(痙縮)やしびれ、疼痛の緩和、排便機能の改善にも寄与するとされています6)。また、個人用途の外骨格も実在し、自宅や地域での使用例も報告されています7)。このように、外骨格の活用により、日常生活動作(ADL)の拡大や生活の質(QOL)の向上が期待されます。
一方で、外骨格の使用にはいくつかの条件や課題も存在します。まず、杖との併用が前提となるため、使用者には上肢が健常で一定のバランス能力が求められます。また、安全かつ効果的に使用するためには、正しい使用方法や操作に関する講習やトレーニングプログラムの受講が必要です。さらに、使用者の安全を確保するには介助者のサポートが不可欠であり、介助者自身も転倒や怪我のリスクを伴うため、介助者の安全にも十分な配慮が求められます。
加えて、外骨格の運用においては、皮膚トラブルや転倒といったリスクも指摘されています6)。臨床では、皮膚トラブルを予防するために、外骨格と身体の接触部位にタオルや軟質パッドを取り付けることが一般的です。また、理学療法士が接触介助や近接監視を行うことで、転倒リスクの軽減を図っています。本来であれば、機器そのものを改良し、リスクを低減することが望まれますが、既製品の改造には限界があるのが現状です。
3. 調節機構を備えた歩行支援機器の試作と評価
私たちは、吉備高原医療リハビリテーションセンターの協力のもと、安全性と使用性を考慮した歩行支援機器の開発に取り組んでいます8)。図1は試作したプロトタイプです。この装置は、腰部と下肢を支えるフレームにアクチュエータを取り付け、股関節と膝関節を動力化しています。足関節はダブルクレンザックと呼ばれるバネ式の機構となっています。フレームの長さは使用者の身長に応じて調節可能です。また、O脚やX脚にも対応できるよう、関節角度を左右に調節できる新しい機構も備えています。

図1 脊髄損傷者用歩行支援機器のプロトタイプ
制御にはPLC(プログラマブル・ロジック・コントローラ)を用い、歩行や立ち座りの動作プログラムを実行します。歩行モードでは、使用者が体幹を前方に傾けるとモーションセンサが角度を検知し、一定のしきい値を超えるとアクチュエータが作動して下肢を振り出す仕組みです。歩行停止やモード切り替えは、杖のグリップに取り付けた無線スイッチで行います。また、専用ソフトウェアで動作プログラムを個別に変更することも可能です。
評価実験では、プロトタイプを健常者に装着してもらい、歩行分析を行いました(図2)。計測には、慣性センサを搭載した着衣型マーカレス・モーションキャプチャ(e-skin MEVA, Xenoma)を使用しました。これにより、従来の光学式モーションキャプチャではマーカが外骨格のフレームに隠れてしまう問題や、機械式関節ゴニオメータではセンサが干渉する問題を回避できました。取得した歩行データは、3次元の関節角度情報として出力され、これを基に参加者の3D骨格モデルを再構築しました。再構築したモデルでは、歩行時の各関節の動きを時系列で可視化するとともに、外骨格装着の有無による下肢関節角度の変化を比較検討しました。その結果、参加者全員がプロトタイプを装着して動力歩行が可能であり、自然に近い歩行パターンが得られることを確認しました。しかしながら、歩行速度の向上や歩行パラメータの微調整が今後の課題として残されました。

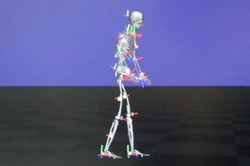
図2 左:健常者によるプロトタイプを装着した歩行の様子,右:同時に取得した歩行データをもとに再構築した3D骨格モデル.
4. おわりに
本研究を通じて、脊髄損傷者用の外骨格の設計において必要となる機器のサイズや調節範囲、トルク、制御方法、歩行パターンに関する基礎的知見を得ることができました。また、これまで計測が難しかった機器装着時の歩行データを取得できたことも重要な成果です。今後は、得られた知見をもとに機器の調整や改良を進め、より安全で使いやすい歩行支援機器の設計要件についてさらに調べる予定です。
参考文献
- Miyakoshi N, Suda K, Kudo D, et al. A nationwide survey on the incidence and characteristics of traumatic spinal cord injury in Japan in 2018. Spinal Cord 2021; 59(6): 626-634. .
- 労働者健康福祉機構全国脊髄損傷データベース研究会.脊髄損傷の治療から社会復帰まで: 全国脊髄損傷データベースの分析から.東京:保健文化社,2010.
- 高橋明子,梅崎重夫.労働災害による脊髄損傷の発生傾向の分析-労働災害データを対象として-.労働安全衛生研究 2019; 12(1): 41-50.
- 田中宏太佳.医学的リハビリテーションからみた切断・脳卒中・脊髄損傷患者の職場復帰の現状と課題.Jpn J Rehabil Med 2013; 50 (1): 11-15.
- 内田竜生,住田幹男,富永俊克,他.脊髄損傷患者の復職状況と就労支援.日職災医誌 2003; 51(3): 188-196.
- He Y, Eguren D, Luu TP, et al. Risk management and regulations for lower limb medical exoskeletons: a review. Med Devices 2017; 10: 89-107.
- van Dijsseldonk RB, van Nes IJW, Geurts ACH, et al. Exoskeleton home and community use in people with complete spinal cord injury. Sci Rep. 2020; 10(1): 15600.
- Oyama H, Ikeda H. Design and functional evaluation of an adjustable powered exoskeleton for gait assistance. Technol Disabil 2025; 37(2): 149-161.
 |
 |
 |
 |
 |